


Robotika – ultrazvukový senzor pre Micro:bit
Ultrazvukový merač vzdialenosti Sensor:bit pre populárnu mikropočítačovú dosku BBC Micro:bit umožní merať vzdialenosti 4 ÷ 400 cm s presnosťou 1 cm. To umožňuje vášmu robotickému podvozku orientáciu v priestore, napríklad pri úlohách typu prechod labyrintom. Ak robot pomocou senzora zistí, že je pred ním prekážka, môže včas zmeniť smer.
Video ukazuje, ako fungujú všetky príklady v článku
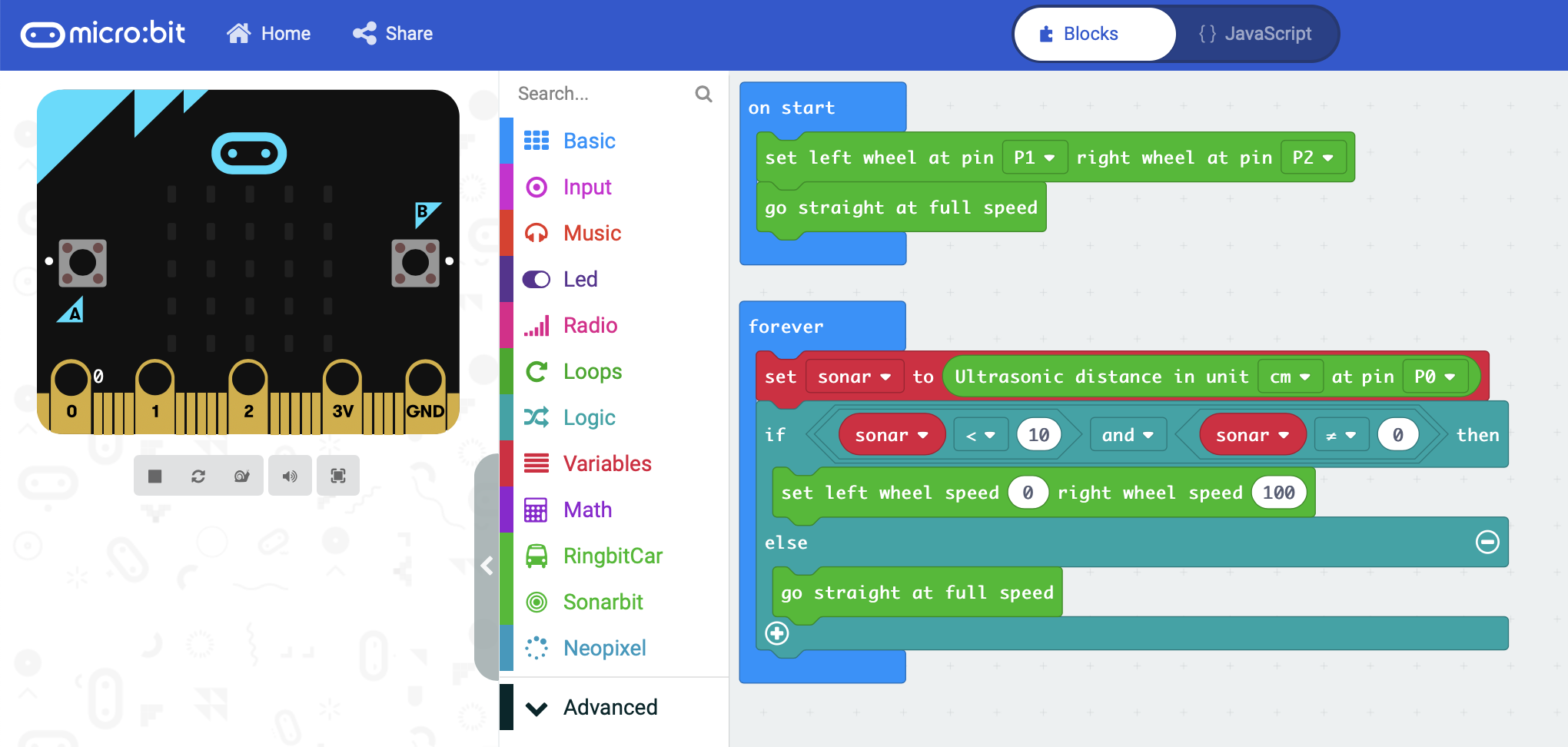
Senzor obsahuje akustický menič schopný vyslať ultrazvukový signál a mikrofón. Funguje tak, že vyšle ultrazvukový signál a čaká až sa odrazí od prekážky a vráti sa k prijímaciemu senzoru. Následne sa zmeria časový rozdiel medzi vyslaním a prijatím signálu a keďže rýchlosť šírenia zvuku je známa, podľa jednoduchého vzorca sa dá vypočítať vzdialenosť od prekážky. Tento výpočet robiť nemusíte, zariadia to funkcie z knižnice, takže vaša aplikácia bude mať k dispozícii priamo výslednú vzdialenosť od prekážky. Pripomíname, že v online vývojovom prostredí https://makecode.microbit.orgje potrebné do projektu importovať rozšírenia “ringbitcar” a „sonarbit“.
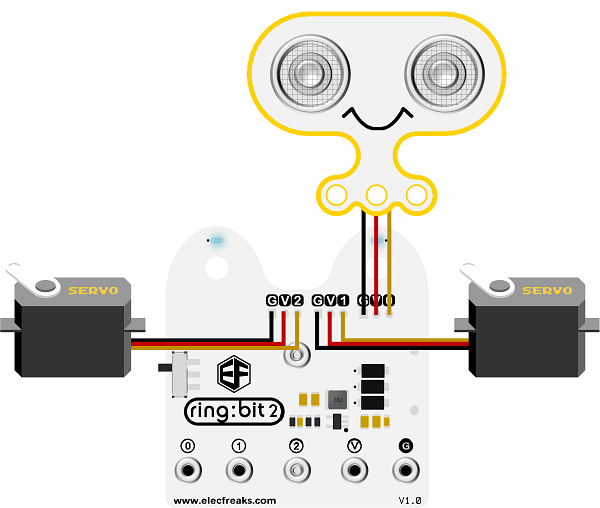
Senzor je okrem vodičov privádzajúcich napájacie napätie 3.3 V, čiže VCC a GND pripojený l Micro:bitu len jedným dátovým vodičom, čiže údaje sa prenášajú po trojvodičovom rozhraní založenom na zbernici 1-Wire. Väčšina ultrazvukových snímačov pre Arduino, či iné mikrokontroléry má totiž 4 vodiče (VCC, GND, TRIG, ECHO), takže pripojenie si vyžaduje dva porty. Senzor je univerzálny Rozsah napájacieho napätia je 3 ÷ 5 V. To znamená, že merač vzdialenosti môžete použiť ako v 3,3V, tak v 5V systémoch.
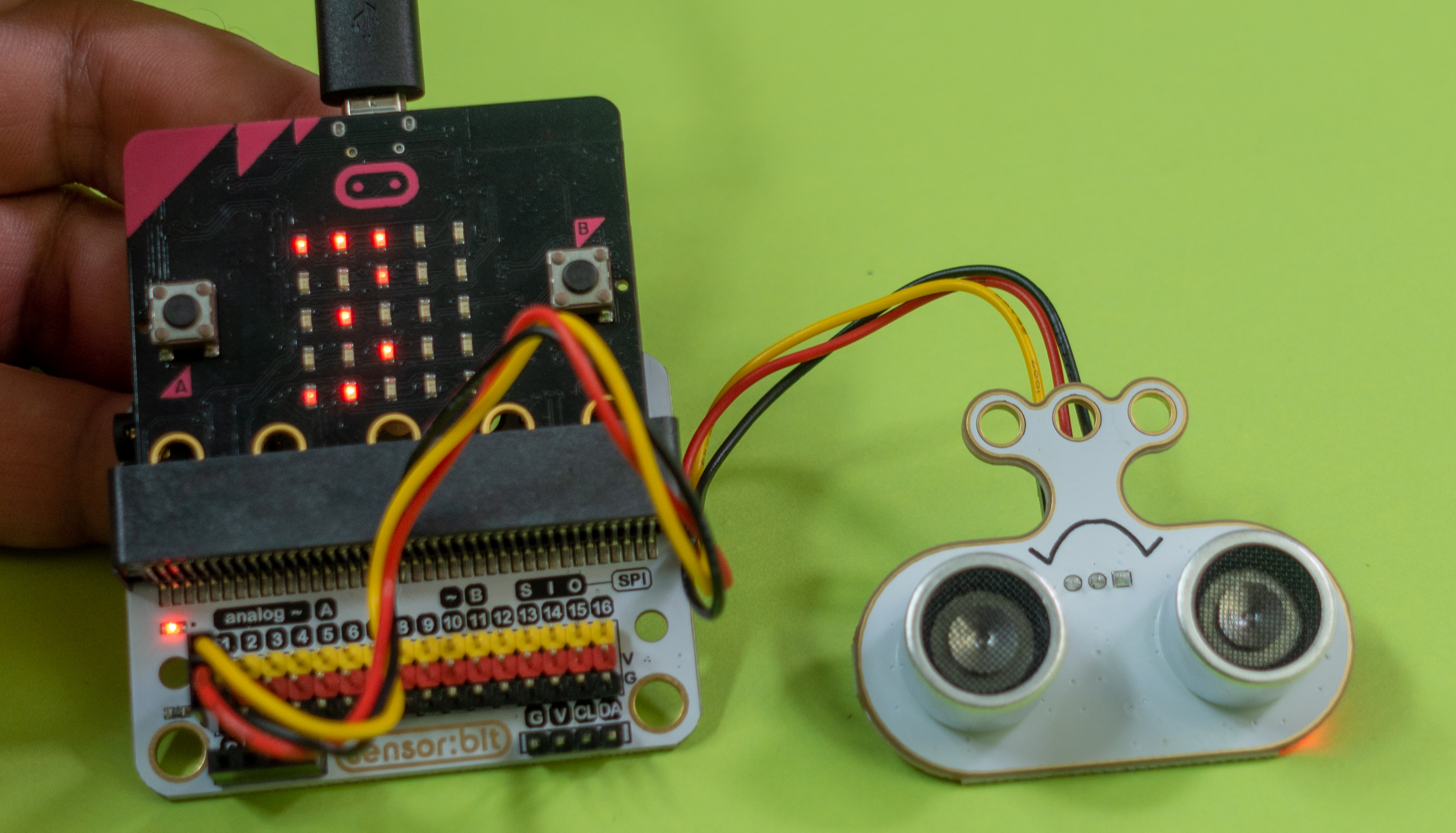
V prvom jednoduchom príklade budeme na maticovom displeji microbitu zobrazovať nameranú vzdialenosť. Na tento príklad nie je potrebný robotický podvozok, stačí pripojiť senzor vez dosku Sensor:bit, alebo využiť vodiče s pinmi určené do prepojovacieho poľa.

JavaScript
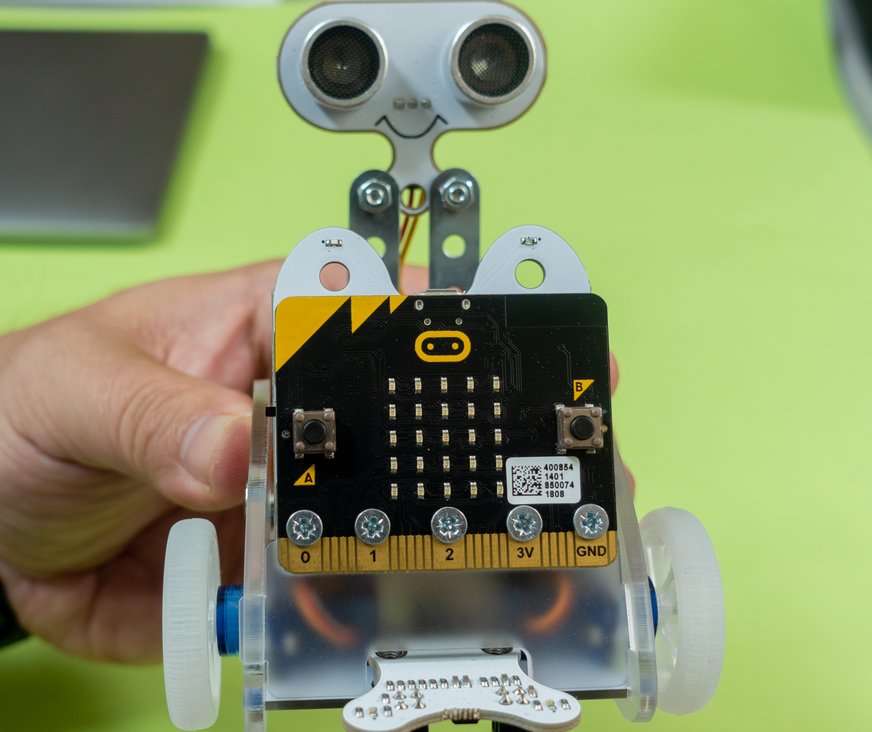
K robotickému podvozku Ring:bit V2 sme ultrazvukový snímač upevnili pomocou dvoch líšt zo stavebnice Merkur, nakoľko sme nemali originálny plexisklový mechanický diel.
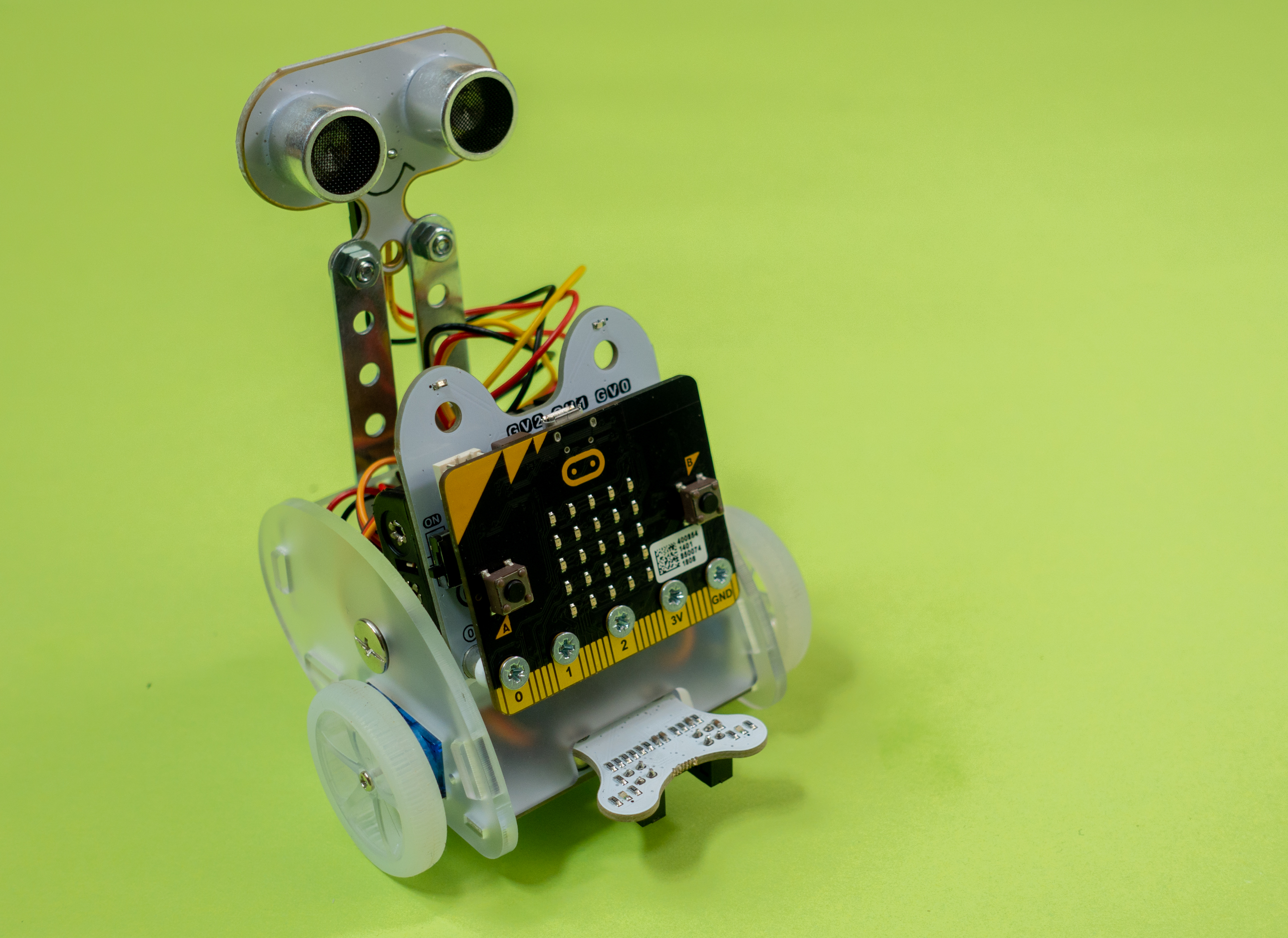 |
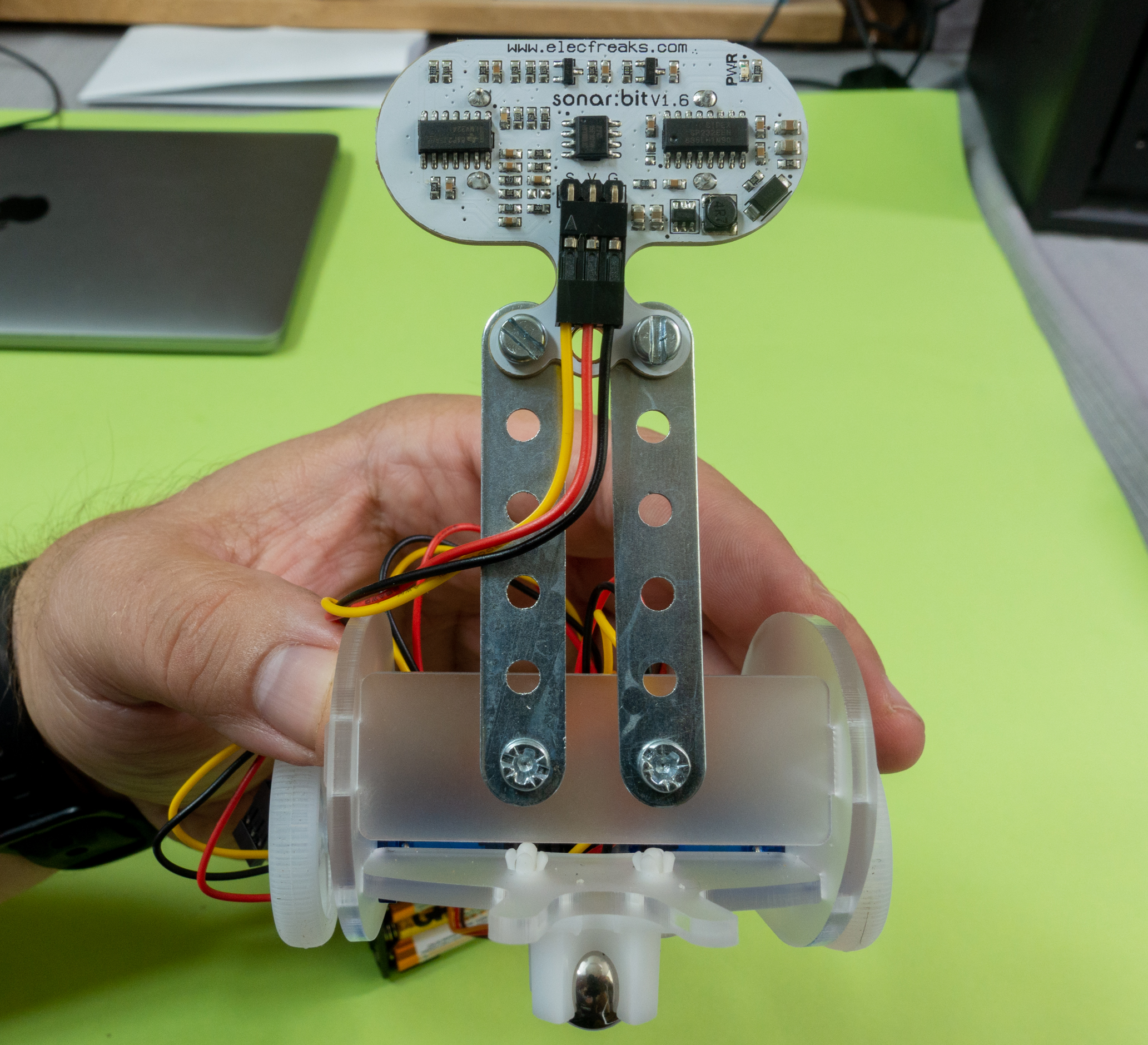 |
Senzor sa zapojí na port, kde je inak pripojená spodná doska elektroniky, na ktorú sa upevňuje rôzne príslušenstvo, napríklad infračervené čidlá na sledovanie čiary, či nárazník s RGB LED diódami.
Kód je veľmi jednoduchý, ak senzor zistí, že vo vzdialenosti menšej ako 25 cm je prekážka, otočí sa doľava. Tých 25 cm je z dôvodu, že senzor nie je na robotickom podvozku umiestnený úplne vpredu a potrebuje aj nejaký priestor aby sa mohol otočiť. Parameter v príkaze pause() určuje o aký uhol sa podvozok pootočí.
JavaScript
V pokračovaní predstavíme joystick pre Micro:bit, ktorý bude cez rádiové prepojenie ovládať zariadenie taktiež s Micro:bitom
Zobrazit Galériu

