


Malý robot dokáže plávať ako červ vysokou rýchlosťou
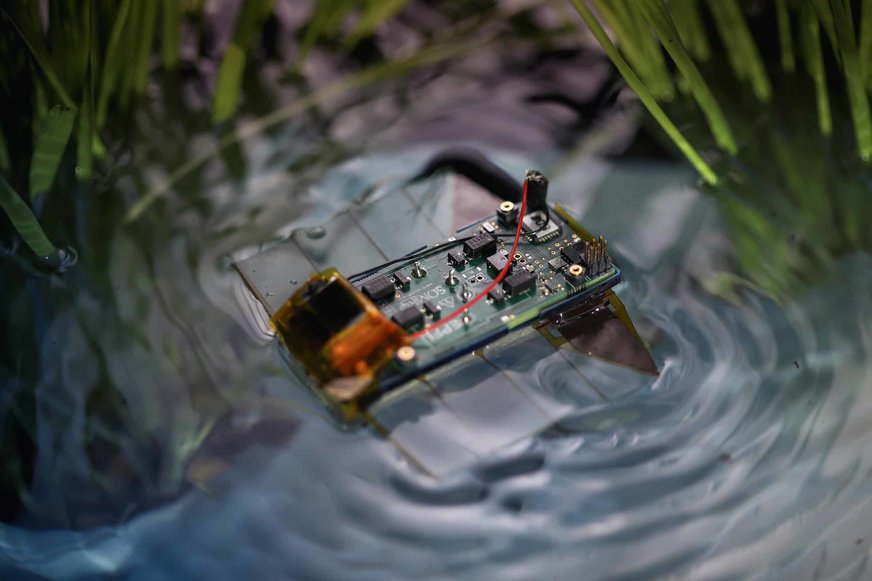
Morské ploskavce dokážu efektívne kĺzať po vode vlnením svojich tenkých plochých tiel. Vedci z École Polytechnique Fédérale de Lausanne (EPFL) inšpirovaní týmito prirodzenými plavcami navrhli vysoko agilný, nepripútaný plávajúci robot, ktorý napodobňuje ich pohyby. Centimetrový robot s mäkkým telom by sa dal použiť pri monitorovaní životného prostredia, v akvakultúre a raz možno aj pri skúmaní mimozemských svetov.
Plávajúce roboty nie sú novinkou, používajú sa už na mapovanie znečistenia, monitorovanie kvality vody a štúdium vodných ekosystémov, ako sú koraly a jazerá. Tieto zariadenia však zvyčajne používajú hlučné vrtule, ktoré rušia živočíchy, navyše nie sú ani veľmi efektívne. Okrem toho sú objemné a je pre ne ťažké manévrovať v týchto prostrediach.
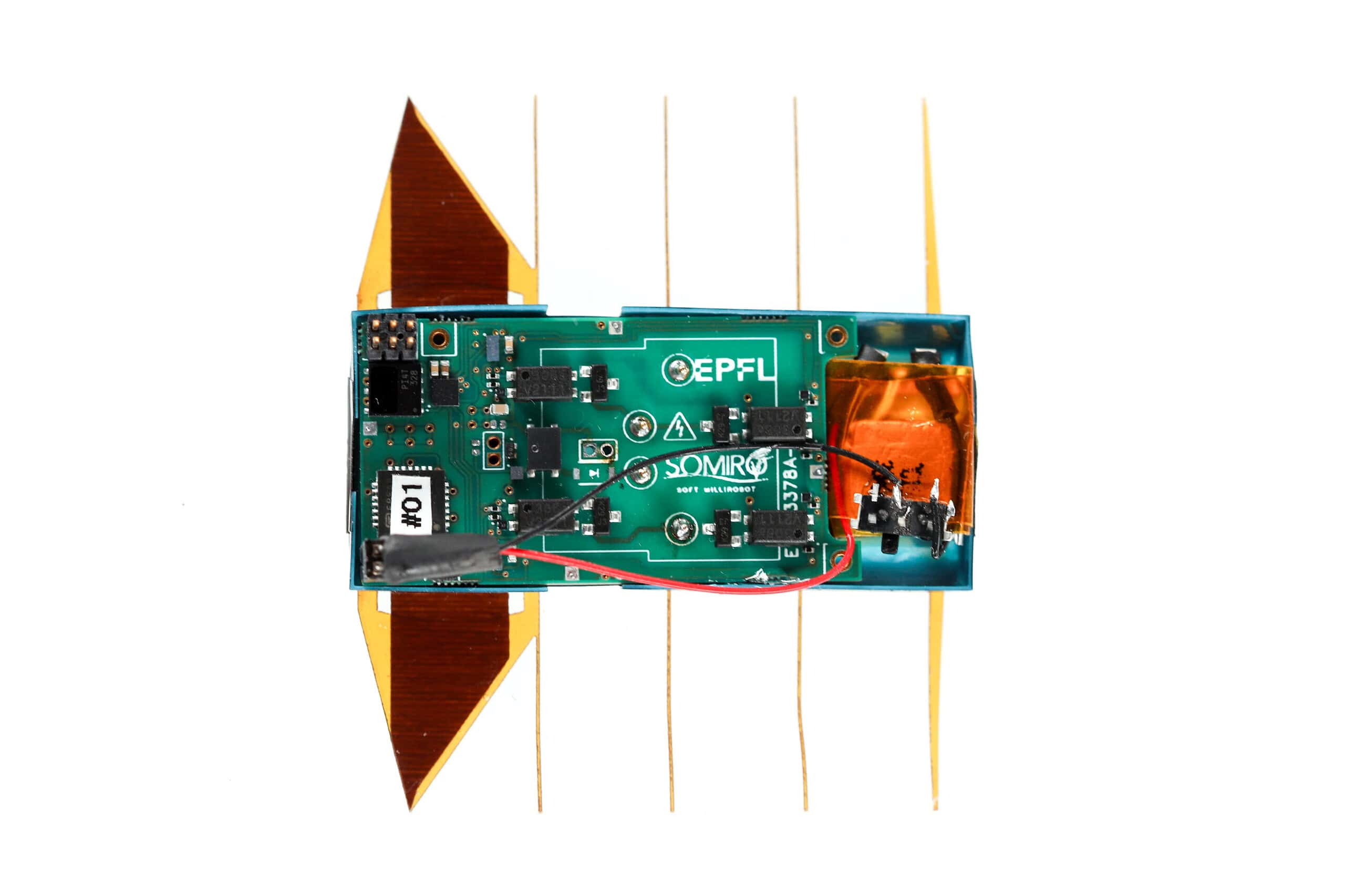
Preto sa výskumníci v oblasti robotov už dlho snažia napodobniť účinnosť prírody, najmä vo vodnom prostredí. Nový robot má dĺžku od 25 mm do 45 mm. Dosahuje vysokorýchlostný pohyb v pripútanom (12 cm/s) aj nepripútanom (5,1 cm/s) režime, čím demonštruje bezkonkurenčnú obratnosť vo svojej veľkostnej kategórii. Na rozdiel od mnohých predchádzajúcich návrhov, ktoré sa spoliehali na miniatúrne jednosmerné elektromotory alebo hydrogély, tento robot integruje mäkké elektrohydraulické aktuátory.

Ide o flexibilné kapacitné zariadenia, ktoré využívajú aplikované elektrické pole na vytvorenie Maxwellovho napätia. To spôsobuje, že elektródy sa zopnú a vytlačia tekuté dielektrikum, čo vedie k riadenému ohýbaniu alebo vlnivému pohybu. Tieto aktuátory poskytujú výkonný a zároveň ľahký pohonný systém. Spotrebujú menej ako 35 mW energie a fungujú viac ako 750 000 cyklov, kým sa prejavia známky opotrebovania.
Výskumníci z EPFL sa inšpirovali polycladidami (morskými ploskavcami), ktoré sa pomocou nepretržitého vlnenia ľahko kĺžu po vode. Ich robot kopíruje tento pohyb generovaním viac ako 1,5 vlnovej dĺžky pozdĺž plutiev, vďaka čomu je stabilnejší a efektívnejší ako väčšina umelých vlnivých plavcov. Kľúčová inovácia však pochádza viac z geometrie ako z fyziky.
Zdroj Foto: EPFL-LMTS
Plochá štruktúra robota s hrúbkou iba 500 mikrometrov pláva na vodnej hladine v dôsledku povrchového napätia, čo mu umožňuje niesť dodatočnú hmotnosť pomocou vztlakových prvkov. Použitie mäkkých elektrohydraulických aktuátorov umožňuje nezávislé ovládanie každej plutvy, čo uľahčuje presný smerový pohyb. Robot dokáže mávať plutvami desaťkrát rýchlejšie ako ryby, čím dosahuje lepšie smerové ovládanie.
Tieto roboty by v podstate mohli fungovať ako podvodné drony, či už na detekciu znečisťujúcich látok, mikroplastov, alebo škodlivých rias, prípadne na štúdium vodného života s minimálnym narušením. Keď výskumníci zdokonalia túto technológiu, čoskoro budeme môcť vidieť roje týchto miniatúrnych robotov autonómne hliadkujúcich v jazerách, riekach a oceánoch, zbierajúcich údaje a pomáhajúcich pri úsilí o ochranu životného prostredia. Štúdia bola publikovaná v časopise Science Robotics.
Zdroj: zmescience.com.
Zdroj Foto: EPFL-LMTS
Zobrazit Galériu

