


Pokročilý robot vybavený AI si vami zahrá aj bedminton
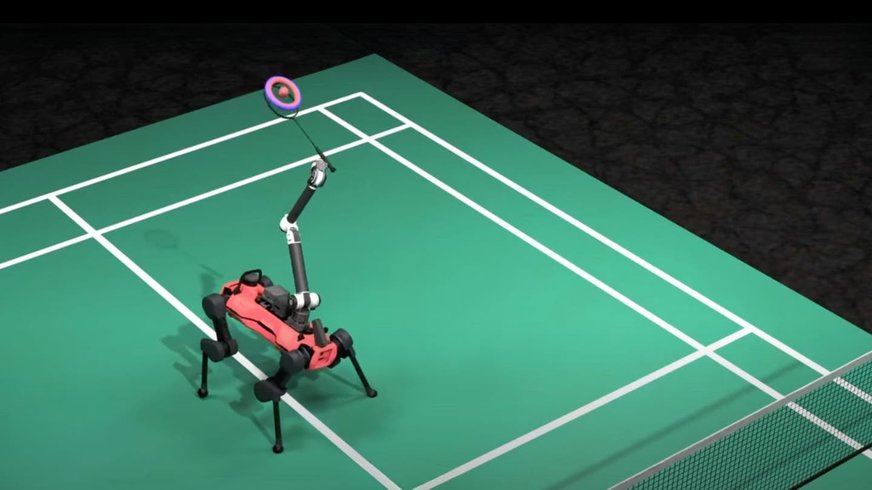
Vo fascinujúcom spojení umelej inteligencie a robotiky predstavili výskumníci z ETH Zurich vo Švajčiarsku robota ANYmal-D, pokročilého štvornohého robota schopného hrať bedminton s ľudskou agilitou a presnosťou. Hra bedmintonu vyžaduje mimoriadnu obratnosť, presnosť a koordináciu, čo sú schopnosti, ktoré je pre roboty náročné replikovať kvôli obmedzeniam v súčasných riadiacich systémoch a hardvéri.
Napríklad ľudské oči sú oveľa lepšie ako komerčné robotické kamery v stabilizácii pohybu a zaostrovaní, čo robí vizuálne sledovanie rýchlo sa pohybujúceho košíka veľmi zložitým. Na prekonanie týchto výziev vyvinuli výskumníci v ETH Zurich jednotný riadiaci systém založený na posilňovacom učení pre robota ANYmal-D. Tento systém autonómne integruje pohyb nôh a švih raketou, čo umožňuje robotovi sledovať, predpovedať a vracať údery košíka v reálnom čase.
Robot využíva stereo kamery na videnie, čo mu umožňuje presne rozlíšiť košík od okolia a vypočítať jeho trajektóriu. Inovatívny "model šumu vnímania" umožňuje robotovi učiť sa z reálnych, nedokonalých vizuálnych vstupov, čo zabezpečuje jeho výkon aj na nerovných povrchoch alebo v náročných svetelných podmienkach. Táto schopnosť učiť sa z "rozmazaných, hlučných vstupov" z reálneho sveta je kľúčová, pretože umožňuje robotovi hrať bedminton aj mimo laboratória s nepredvídateľnou viditeľnosťou.
Počas testov ANYmal-D úspešne udržal výmeny až do 10 po sebe idúcich úderov s ľudskými hráčmi. Jeho dynamické pohyby zahŕňajú prispôsobenie chôdze pre optimálne načasovanie a vzdialenosť, a dokonca sa dokáže postaviť na zadné nohy, aby udržal vizuálny kontakt s košíkom a zároveň si zachoval rovnováhu. Robot dokáže zachytiť košíky pohybujúce sa rýchlosťou až 12,19 metra za sekundu (40 stôp za sekundu).
Napriek týmto pôsobivým výkonom robot stále bojuje s veľmi rýchlymi alebo agresívnymi údermi, ako sú smeče. Tím pripisuje nižšiu úspešnosť v týchto scenároch obmedzeniam hardvéru, konkrétne rýchlosti kamery a výkonu aktuátorov, a nie nedostatkom v AI algoritmoch. To odhaľuje spoločné úzke miesto v pokročilej robotike: zatiaľ čo schopnosti AI rýchlo napredujú, fyzické komponenty, ako sú senzory a motory, často zaostávajú.
To naznačuje, že budúce prelomové objavy vo výkone robotov môžu čoraz viac závisieť od pokroku v materiálových vedách a strojárstve, aby sa vytvorili rýchlejšie a citlivejšie fyzické telá, a nie len od zlepšenia softvéru. V súčasnosti existuje priemerné oneskorenie 0,375 sekundy medzi úderom súpera a prvým príkazom robota na švih.
Budúci vývoj sa zameriava na zníženie tejto latencie a umožnenie dlhších, konkurencieschopnejších výmen, potenciálne vedúcich k plnohodnotným zápasom na celom kurte. Tento prelom je viac než len zábavná ukážka; ponúka neoceniteľné poznatky pre kritické aplikácie vyžadujúce plánovanie pohybu a koordináciu v reálnom čase, ako sú pátracie a záchranné operácie, komplexná automatizácia skladov a podpora rehabilitácie.
Zdroj: foxnews.com.
Zdroj Foto: ETH Zurich


