



Robot s 20 nohami pokračuje v pohybe aj pri poškodení
KĽÚČOVÉ ZISTENIA:
-
Stroj disponuje dvadsiatimi nohami so snímačmi hĺbky.
-
Konštrukcia nemá určenú prednú ani zadnú stranu.
-
Zariadenie pokračuje v pohybe aj pri poškodení.
Výskumníci z Duke University v Severnej Karolíne vyvinuli robota s označením Argus. Tím pod vedením profesora Boyuana Chena a doktoranda Jiaxuna Liua odmietol pri návrhu tradičnú biologickú symetriu. Výsledkom je zariadenie, ktoré disponuje dvadsiatimi teleskopickými nohami lúčovito vychádzajúcimi z centrálneho jadra.
Na každej končatine je umiestnená kamera so schopnosťou snímania hĺbky priestoru. Vďaka tejto architektúre robot nemá definovanú prednú, zadnú, vrchnú ani spodnú časť. Tento tvar mu umožňuje presun v akomkoľvek smere bez nutnosti otáčania.
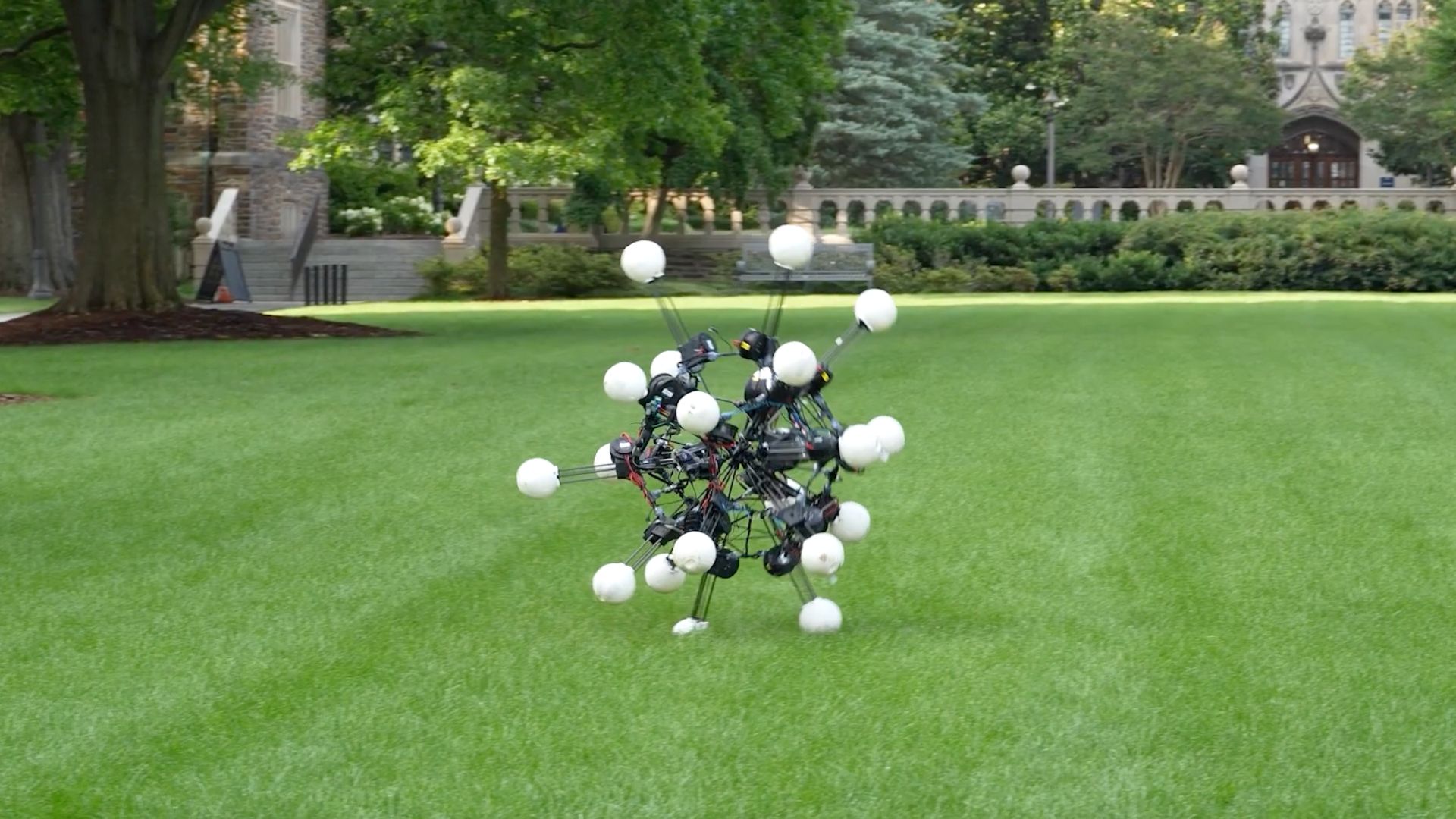
Zdroj foto: Duke University
Výskum bol publikovaný v odbornom žurnále Science Robotics a predstavuje princíp s názvom dynamická izotropia. Táto metrika hodnotí schopnosť robotov rovnomerne zrýchľovať vo všetkých smeroch na škále od nuly do jednej. Kým bežné humanoidné stroje a drony dosahujú skóre pod úrovňou 0,6, Argus dosiahol hodnotu 0,91.
Počas experimentov sa zariadenie pohybovalo po piesočnatých plážach a v lesnom poraste. Konštrukcia umožňuje šplhanie medzi paralelnými tehlovými stenami pomocou striedavých vzpieracích a tlačných pohybov. Stroj si udržiava stabilitu pri nárazoch a dokáže pokračovať v činnosti aj v prípade zlyhania niektorého z motorov.
Schopnosť rovnomernej akcelerácie minimalizuje čas potrebný na orientáciu v zložitom teréne. Konštrukčný princíp dynamickej izotropie môže v budúcnosti nájsť uplatnenie pri návrhoch podmorských a vzdušných autonómnych robotov.
PREČO JE TO DÔLEŽITÉ: Viacsmerová mobilita a redundancia súčiastok zvyšujú spoľahlivosť strojov v náročnom a nepredvídateľnom prostredí.
Zdroj: interestingengineering.com foto: ChatGPT/Duke University
Zobrazit Galériu

