Tlačené umelé svaly odstraňujú potrebu zložitej robotickej mechaniky
KĽÚČOVÉ ZISTENIA:
-
Technológia spája aktívny a pasívny elastomér do jedného vlákna.
-
Teplo spôsobuje kontrolované ohýbanie a krútenie materiálu.
-
Metóda nahrádza ťažké hydraulické aj pneumatické robotické súčiastky.
Výskumníci z Harvardského inštitútu vyvinuli metódu výroby mäkkých robotických svalov, ktorá vkladá pohybové inštrukcie priamo do samotného materiálu. Tento prístup eliminuje potrebu pevných kĺbov, kovových ozubených kolies a akýchkoľvek zložitých mechanických montáží. Základom celého systému je technológia vrstvenej 3D tlače, ktorá využíva kombináciu dvoch odlišných elastomérov v jednom spoločnom vlákne.
Prvou zložkou je aktívny materiál na báze tekutých kryštálov, ktorý sa po vystavení vyššej teplote začne prirodzene zmršťovať. Druhým komponentom je pasívny elastomér, ktorý sa naopak akejkoľvek deformácii štrukturálne bráni a snaží sa pevne udržať svoj pôvodný tvar. Keďže sú oba materiály vytlačené tesne vedľa seba v spoločnej väzbe, vzniknutý fyzikálny nesúlad donúti celé vlákno ohnúť sa, stiahnuť alebo skrútiť.
Zdroj foto: Lewis Lab / Harvard SEAS
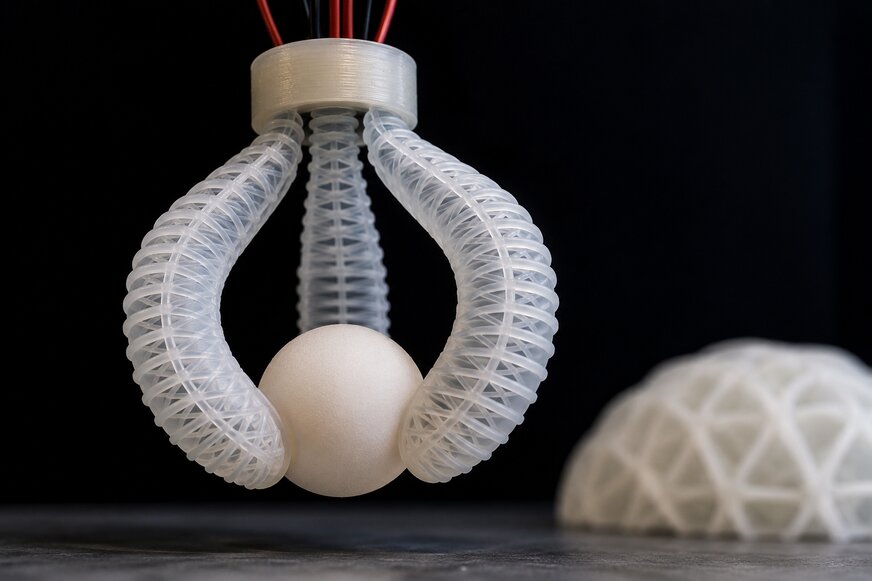
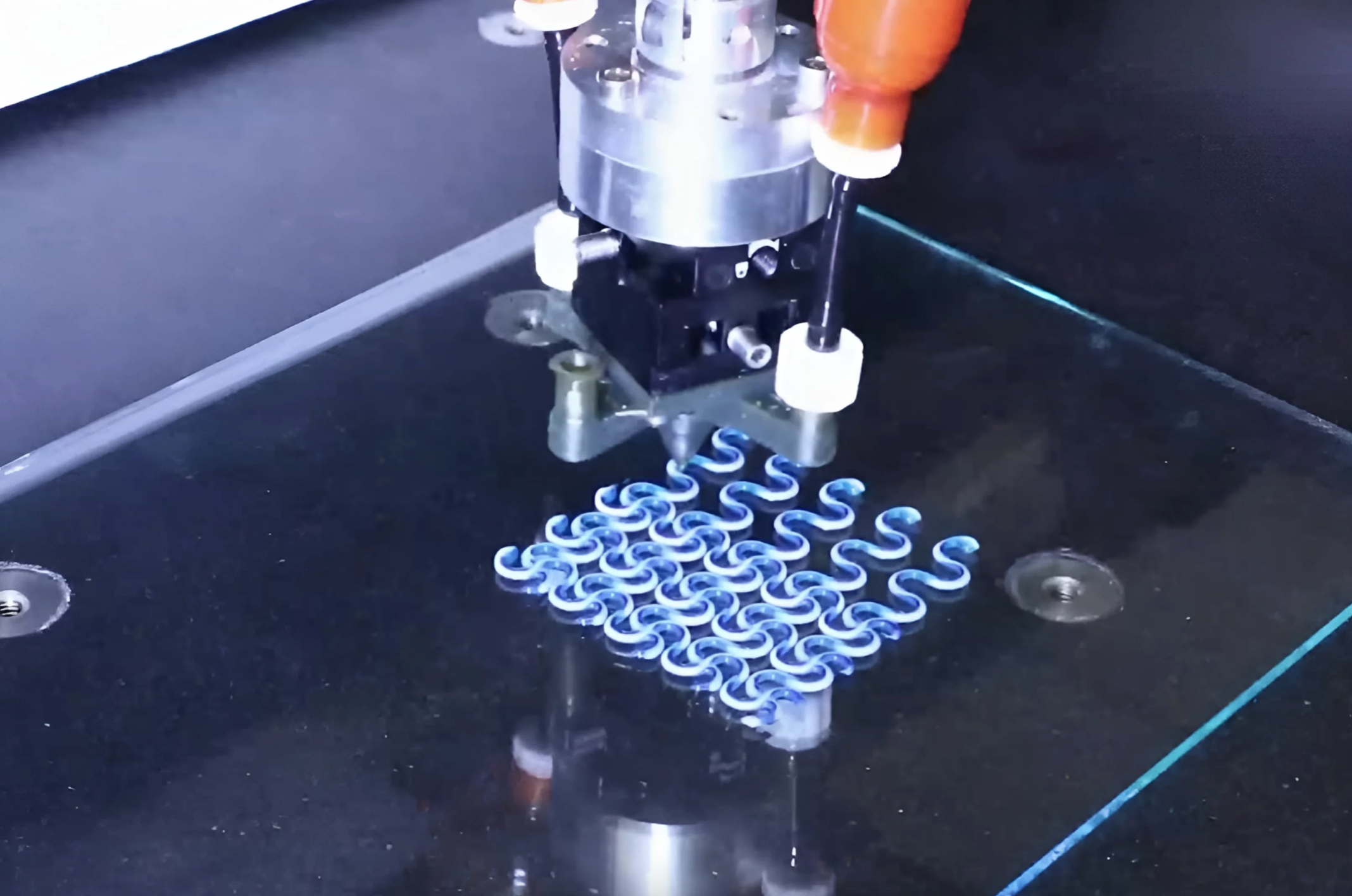
Konkrétny typ pohybu sa programuje už počas tlače pomocou špecializovanej rotačnej trysky, ktorá ukladá materiály do presných špirálovitých vzorov. Vedci pomocou tohto postupu dokázali vytlačiť plochú štruktúru, ktorá sa po cielenom zahriatí rýchlo transformovala do trojrozmerného kupolovitého tvaru. Tím tiež vyrobil sériu funkčných chápadiel, ktoré sa samostatne spustili na testovaný predmet, pevne ho obopli, zdvihli a nakoniec uvoľnili.
Doterajšie prístupy k modernej mäkkej robotike sa spoliehali prevažne na zložité pneumatické systémy. Tieto riešenia však nevyhnutne vyžadovali pripojenie na neohrabané externé vzduchové kompresory a priestorovo náročnú spleť prívodných hadíc. Nový systém zapracovaný priamo do hmoty svalov je technicky výrazne elegantnejší a stáva sa úplne nezávislým od externej infraštruktúry.
Zdroj foto: Lewis Lab / Harvard SEAS
Inovácia sa v súčasnosti nachádza v experimentálnej laboratórnej fáze a potýka sa s niekoľkými zásadnými technologickými prekážkami. Tou najväčšou je závislosť od externej tepelnej aktivácie, čo spomaľuje rýchlosť odozvy a výrazne znižuje celkovú energetickú efektivitu celého zariadenia. Syntetické svaly tiež zatiaľ nedisponujú dostatočnou silou na to, aby dokázali plnohodnotne nahradiť tradičné elektrické motory v priemyselných prevádzkach.
PREČO JE TO DÔLEŽITÉ: Inovácia umožňuje výrobu plne integrovaných mäkkých robotov pre medicínu a jemnú manipuláciu s predmetmi.
Zdroj: newatlas.com foto: ChatGPT
Zobrazit Galériu